Hi there! This is Sikai Li 李思楷. You can call me Sky or Skevin. I am currently a CS Ph.D. student at the University of North Carolina at Chapel Hill, advised by Prof. Mingyu Ding. Previously, I worked as a research assistant with Prof. Dan Roth at the University of Pennsylvania, and with Prof. Christoforos Mavrogiannis and Prof. Nima Fazeli at the University of Michigan. Before that, I received my B.S. in Computer Science from University of Michigan under the supervision of Prof. Joyce Chai.
My primary research interest lies at the intersection of robotics and learning methods, and the goal is to ground robots in the real world.
- Humanoid: Reinforcement learning, motion tracking, sim2real
- Learning from Interactions with Environments and Humans: Robot Learning, robot manipulation, task planning, online learning
- Foundation models: commonsense reasoning, open-vocabulary object detection, supervised fine-tuning & DPO
🔥 New
- 2025.08: 🎉🎉 I will work with Professor Mingyu Ding at UNC - Chapel Hill as a Ph.D. student!
- 2025.06: 🎉🎉 One paper was accepted by ICML 2025 MAS Workshop.
- 2025.01: 🎉🎉 One paper was accepted by ICRA 2025.
📝 Publications
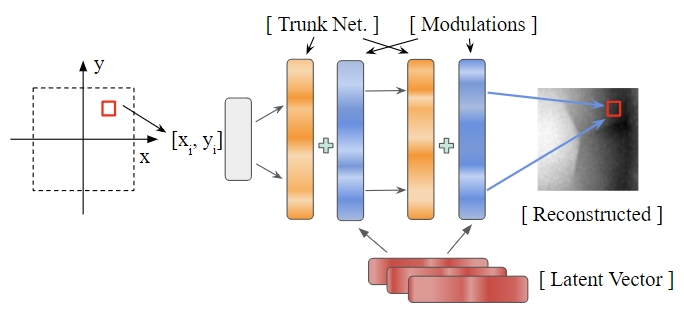
Tactile Functasets: Neural Implicit Representations of Tactile Datasets
Sikai Li, Samanta Rodriguez, Yiming Dou, Andrew Owens, Nima Fazeli
- Rather than directly using raw tactile images, we propose neural implicit functions trained to reconstruct the tactile dataset, producing compact representations that capture the underlying structure of the sensory inputs.
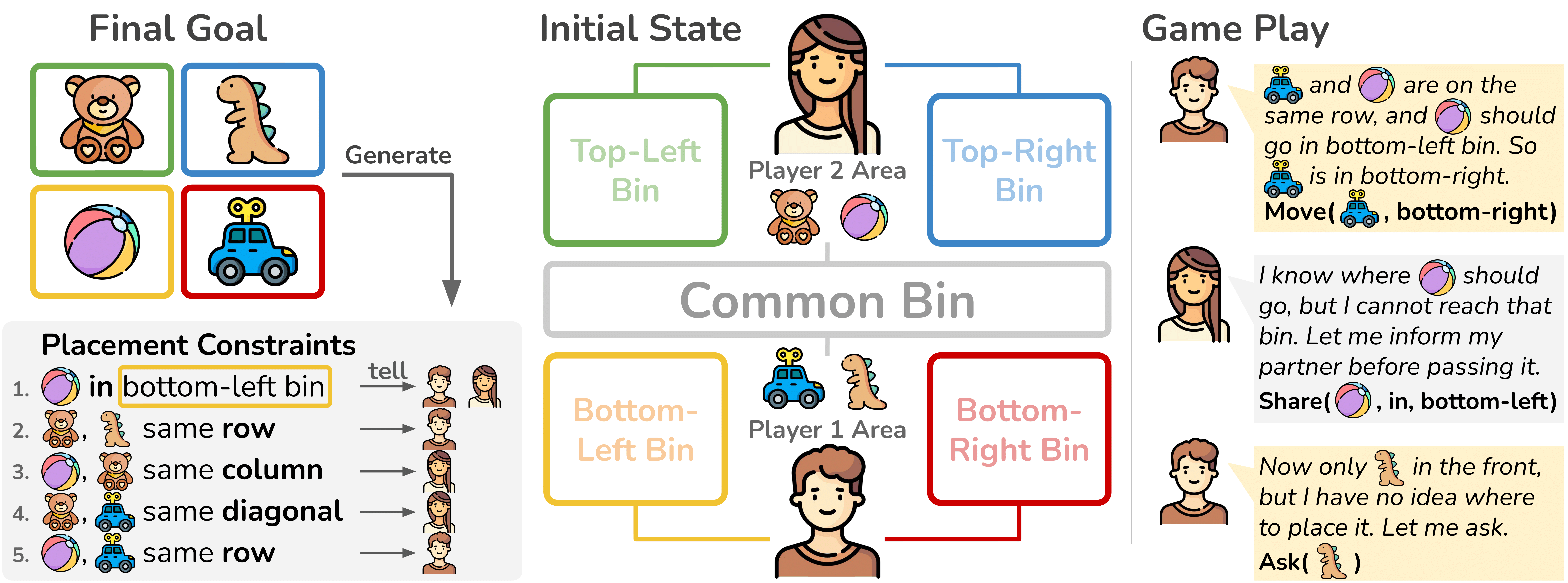
Communication and Verification in LLM Agents towards Collaboration under Information Asymmetry
Run Peng*, Ziqiao Ma*, Amy Pang, Sikai Li, Zhang Xi-Jia, Yingzhuo Yu, Cristian-Paul Bara, Joyce Chai
- We study LLM agents in task collaboration, particularly under the condition of information asymmetry, where agents have disparities in their knowledge and skills and need to work together to complete a shared task.
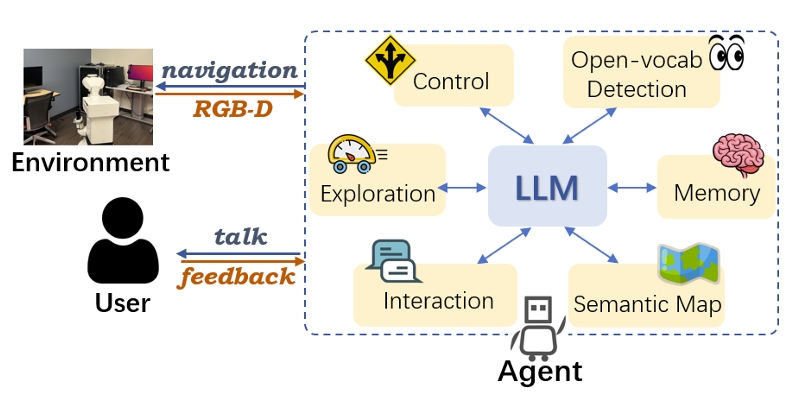
Think, Act, and Ask: Open-World Interactive Personalized Robot Navigation
Yinpei Dai, Run Peng, Sikai Li, Joyce Chai
- We propose a new framework termed Open-woRld Interactive persOnalized Navigation (ORION), which uses Large Language Models to make sequential decisions to manipulate different modules for perception, navigation and communication.
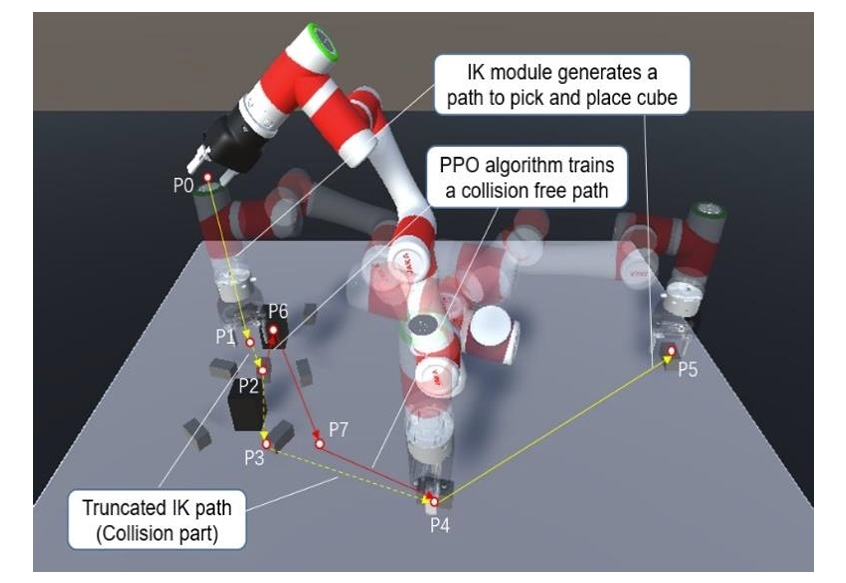
Qi Zhou, Sikai Li, Jingbo Qu, Jin Wu, Haomiao Xu, Youyi Bi
[Paper]
- We propose an adaptive path planning approach for robot arm based on Inverse Kinematics and Deep Reinforcement Learning in a pick-and-place context.
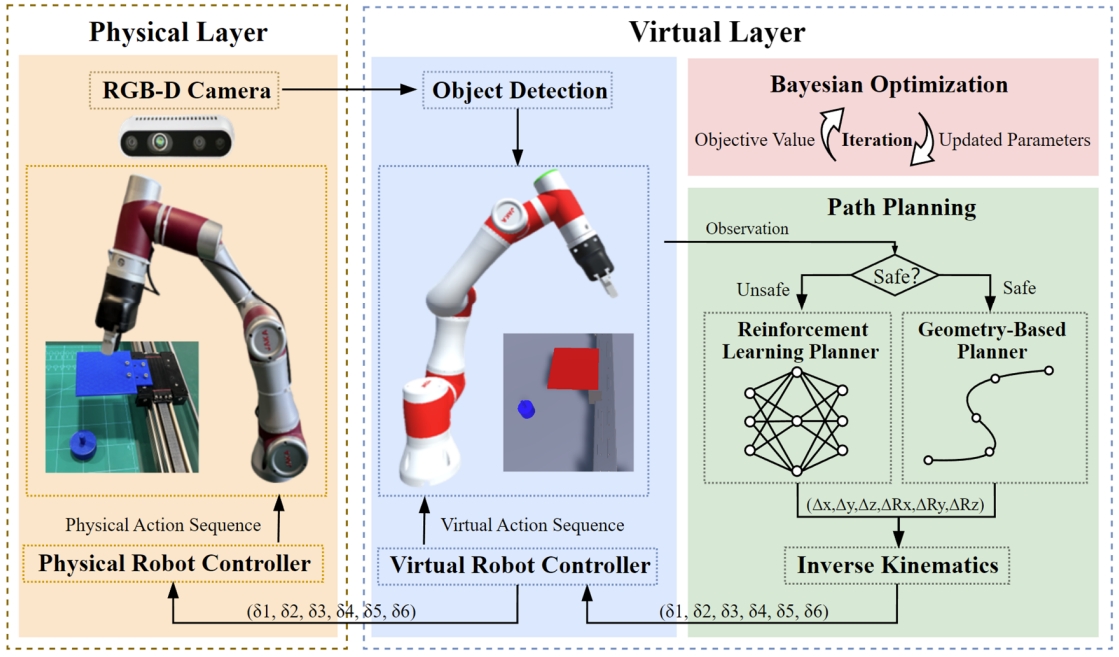
Qi Zhou, Jin Wu, Boyan Li, Sikai Li, Bohan Feng, Jiangshan Liu, Youyi Bi
[Paper]
- An adaptive robot motion planning approach is proposed based on digital twin and reinforcement learning. The core idea is to adaptively select geometry-based or RL-based methods for robot motion planning through a real-time distance detection mechanism, which can reduce the complexity of RL model training and accelerate the training process.
📑 Projects
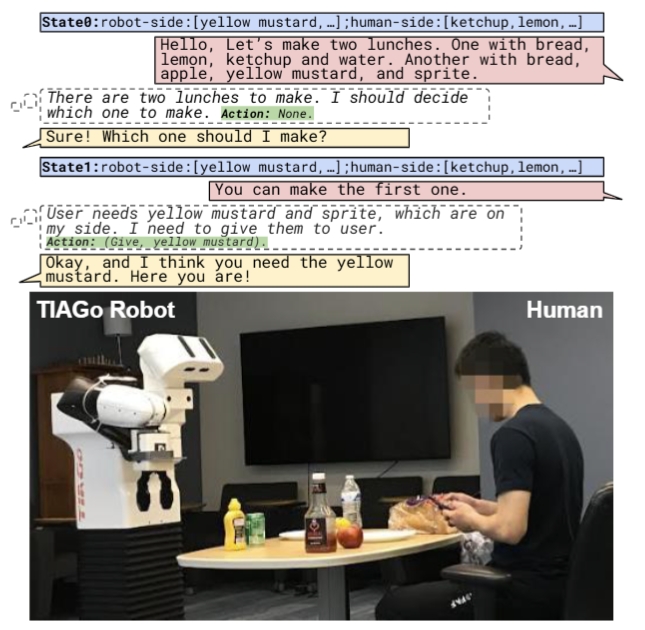
Exploring LLM in Intention Modeling for Human-Robot Collaboration
Sikai Li, Run Peng, Yinpei Dai, Jenny Lee, Joyce Chai [Paper]
- We take an initial step towards Theory of Mind modeling powered by large language models GPT-4 in human-robot communication and collaboration.
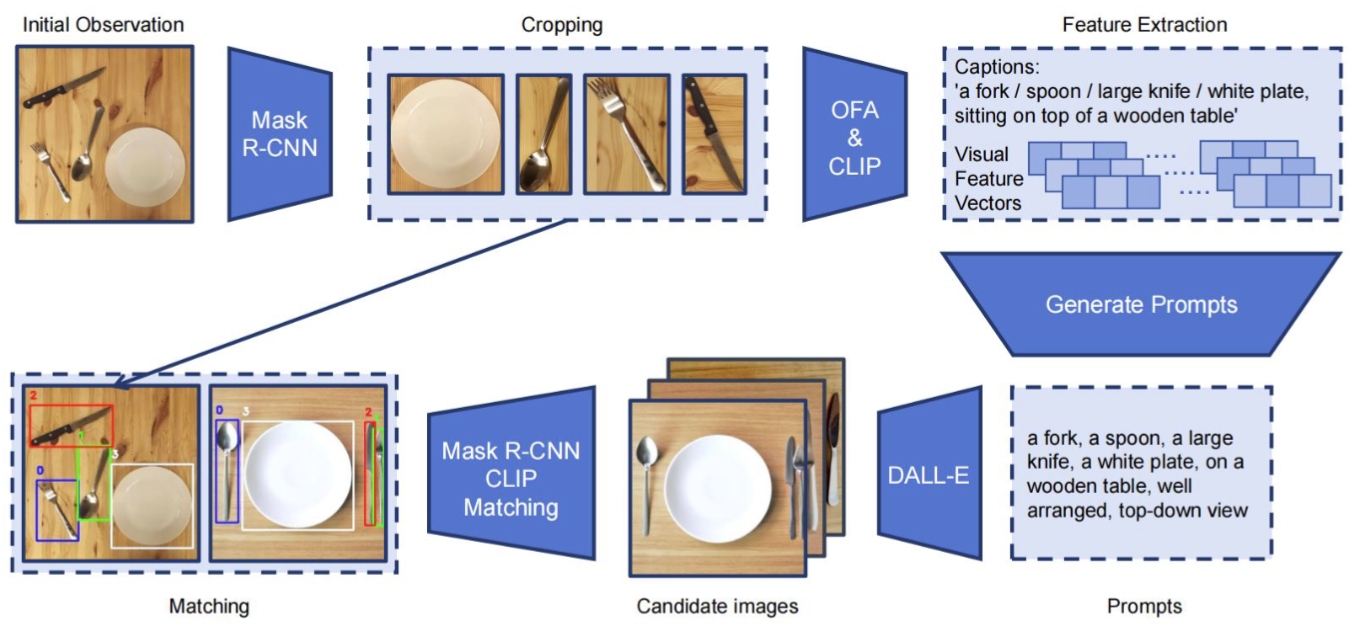
Image Generation for Open-World Object Rearrangement
Sikai Li, Haohong Shang [Paper]
- Inspired by DALL-E-Bot, we reimplement the vision part of its pipeline and present a improved framework that takes an initial observation image as input and outputs an image with same objects but in a natural and human-like layout.
📖 Educations
- 2025.08 - Now, Ph.D. in Computer Science, University of North Carolina at Chapel Hill.
- 2022.08 - 2024.05, BSE in Computer Science & Engineering, University of Michigan.
- 2020.09 - 2025.08, BSE in Electrical & Computer Engineering, Shanghai Jiao Tong University.
💻 Internships and Research Experience
- 2024.09 - 2025.06, Cognitive Computation Group, University of Pennsylvania. Advised by Prof. Dan Roth, mentored by Siyi Liu.
- 2024.05 - 2024.09, Fluent Robotics Lab, University of Michigan. Advised by Prof. Christoforos Mavrogiannis.
- 2024.05 - 2024.09, MMint Lab, University of Michigan. Advised by Nima Fazeli.
- 2023.05 - 2024.07, SLED Lab, University of Michigan. Advised by Prof. Joyce Chai, mentored by Ziqiao Ma and Yinpei Dai.
- 2021.11 - 2023.02, DIDIS Lab, Shanghai Jiao Tong University. Advised by Prof. Youyi Bi.
- 2022.06 - 2022.09, Research and Development Center of Southwest Securities Co., LTD, Shanghai, China.
👔 Service
- Conference Reviewer for IROS, ICRA, WACV
🔥 Hobbies
- Travel: I love road trip🚗 and National Parks, especially the wildlife🐻. I’ve been to 27/63 National Parks in the United States. Recommend Mt. Rainier and Bryce Canyon!
- Music: I like to play the piano (ABRSM Grade 8), the saxophone🎷 and the guitar🎸.
- Sports: Love soccer (Liverpool🔴🐔), volleyball and badminton.
- Gaming: League of Legends➡️Apex Legends (Master in season 17 ^^)➡️Valorant (Ascendant💚 in EPISODE 7: ACT 3)
- Foods: I admire the Canton-style cuisine.